
Diego Bonilla
Hypermedia Online

Robotic solution to capture thousands of panoramas from a single physical space.
PC version only (it runs in low end computers!)
The source file is included in the ZIP file. If you have Adobe Director, you can produce the Mac version.
Double click on the file "Dense Space - Proof of Concept.exe"
You will have to find it among all the panoramas files.
Dense Spaces
Photorealistic Immersive Virtual Reality
(2007)
For several years, I focused my work on a technology that captures and reproduces physical spaces. I developed the ideas, designed the methods to acquire spatial imagery, and implemented them to develop a proof of concept for photorealistic immersive virtual reality. At that time, seeking to file a patent, I hired the Wisconsin Innovation Service Center, at the University of Wisconsin, to make a new product feasibility assessment. The report cited similar technoilogies but recommended to move forward. I filed a provisional patent application and hired a lawyer to do a deeper search.
After several years of hard work and dreaming big (after all, I created immersive virtual environments of photographic quality), my expensive lawyer found a patent application with a technology almost identical to mine. Upon more research, I found that the project already filed was called "sea of images" and was headed by computer scientists from Bell Labs, Harvard, and Princeton.
I stopped working on the project. It took me about 18 months to "ground" the idea -going from the moment I imagined the technology and the method to achieving the actual creation of the first space. Eighteen months is enough time as to make me wonder if my speed of work had an effect on the results.
Even though I didn't get the patent, this project has a well earned place in my professional website and I am proud of the work accomplished. I like that I was able to imagine a new media form and I was able to fully achieve it using computers and, at the time, cutting-edge media capturing technologies. Also, the people who filed first are researchers in renowned institutions with plenty more resources, so I am not being too hard on myself for not working faster.
Below I am copying and pasting information from the provisional patent and other related media that explains how a Dense Space works.
 Dense Space notebook scan 1 |
|---|
 Dense Space notebook scan 2 |
 Dense Space notebook scan 3 |
 Dense Space notebook scan 4 |
 Dense Space notebook scan 5 |
Notebook scans with some of the technical concepts behind the creation of a dense space.
Provisional patent
(Excerpts, 2007)
The subject of this provisional patent is the method and apparatus to capture and present dense photographic immersive virtual environments called Dense Spaces. A Dense Space is a significant advancement from the current state of photographic virtual reality such as QuickTime VR and similar technologies based on a photo quality rendition of a single 360-degree panorama. The main difference with other computer based systems (3D computer renderings) is that Dense Space delivers the immersive virtual environment as it is. The quality of the entire environment is photographic, not computer rendered as it is the case in videogames.
Current photographic virtual reality technologies such as QuickTime Virtual Reality (QTVR) panoramas involve the production of cylindrical or spherical panoramic photographs that can be navigated by panning, tilting and zooming into the 360-degree image. These panoramas are created by taking one or more photographs that later on are stitched together with seamless boundaries to create the illusion of continuity.

One of the 2500 panoramas captured to develop the protoype.
Panoramic images are very popular on the Internet. According to a national survey by the Pew Internet and American Life Project, 45% of American adults have experienced a virtual tour. 2 million people experience virtual tours online per day. The largest percentage of virtual tour users has an income above $70,000.
 Building the robot |
|---|
 Building the robot |
 Building the robot |
 Building the robot |
 Building the robot |
 Building the robot |
 Building the robot |
 Building the robot |
 Building the robot |
 Building the robot |
 Building the robot |
 Setting up |
 Building the robot |
 Testing in a fairly flat surface |
 Driving it from the lab to my office |
Apparatus to capture Dense Spaces
The inherent imprecision of this method resulted in a less-than-ideal “smoothness” while navigating the Dense Space environment. This imprecision is improved by using a robotic system to move the camera with precision along the selected shooting pattern. The robotic system could be designed in many ways from robots that roll on wheels to track-and-pulley systems.
 Dense Space - Second Gen Robot - front view.jpg |
|---|
 Dense Space - Second Gen Robot - lateral view.jpg |
 Dense Space - Second Gen Robot - Structure.jpg |
 lens.jpg |
Design stage of a second generation robotic solution to capture spaces at a faster rate.
 Reconstruction euclidean space (1) |
|---|
 Reconstruction euclidean space (2) |
 Reconstruction euclidean space (3) |
 Reconstruction euclidean space (4) |
 Reconstruction euclidean space (5) |
Capturing of volumetric space allowing the representation of motion in 3 dimensions.

Representation of a single 360 degree panorama.
Dense Space advances the current technology by obtaining thousands of panoramas, in close proximity of each other, from a single physical space. This approach of capturing media can deliver immersive virtual reality experience of photographic quality.
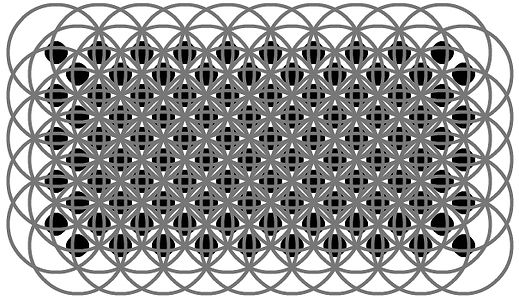
Shooting pattern where thousands of panoramas are placed very close to each other to create a cinematic motion when switching from one to the other.
The overall structure created by this large number of adjacent panoramas can have different shapes; a line, a plane, a volumetric shape or an amorphous pattern. Once that the space has been sampled through this intensive process, the Dense Space is presented through a computerized system that allows the quick presentation of one cylindrical or spherical photographic image to the next, in any 3-dimensional direction, creating a cinematic effect of motion within the environment. For example, in a Dense Space environment one could experience a captured space by crossing a room or navigating down a path with continuous photographic quality and with the ability to look in any direction in any given moment.
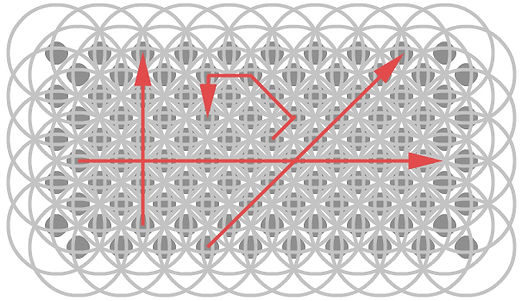
Possible motion movements within a captured space.
I produced a Dense Space by using a cone shaped mirror mounted in the lens of an inverted digital photographic camera. The camera was mounted on a tripod to capture single point panoramas in a 50’ x 50’ grid with each shooting point 1 inch away form each other. The grid forms a plane in space parallel to the floor. The 2500 single point 360-degree panoramas were processed and presented in a graphical user interface (GUI) with Macromedia Director to create a continuous photographic, immersive, and interactive Dense Space environment. I created a simple navigation system that uses a combination of mouse-driven controls in the GUI and keys on the keyboard. Macromedia Director is but one of many programs that can be used to present the Dense Space and the navigation controls can be transferred to any Input/Output (I/O) device, including, but not limited to, mouse, joystick, trackball, touch-screen, and all kinds of motion detectors. The output that can be used for experiencing the Dense Space environment include, but is not limited to, computer monitors, eye-wear systems, and projectors.Several combinations of input and output devices will render different experiences of the environment. For example, the combination of motion detectors and eye-wear would allow a person to walk in an empty space and experience a captured Dense Space.
Time lapse video of the shooting of panoramas process.
The same concepts can be employed to capture a 3-dimensional space of in any shape. The “density” of the space can be increased by shooting more panoramas in a smaller space. The density of the space has an effect on the quality of the cinematic experience; more density creates a stronger sense of visual continuity when the environment is experienced and navigated in any direction (x, y, and z axes). The Dense Space I captured was based on a crude system for placing the camera at each point of a grid, and it required measured movements of a tripod.